suivant: Modélisation du vérin monter: Modélisation du réducteur de précédent: Modélisation du réducteur de Table des matières
On adapte sur le moteur synchrone un dispositif réducteur qui permet d'adapter celui-ci aux exigences de l'application. En effet, les vitesses optimales de fonctionnement d'un moteur électrique sont généralement plus élevées que les vitesses recherchées pour l'application. Cela est particuličrement vrai dans le cas d'application ŕ basse vitesse (<100 tr/min) et, notamment, pour des asservissements de position. Il existe des moteurs d'entrainement direct rendant inutiles l'utilisation d'un réducteur mais ces moteurs sont en général complexes, coûteux et ne permettent pas toujours de satisfaire certaines exigences de précision de positionnement. De plus, ce dispositif permet d'adapter le couple nécessaire ŕ la charge.
La figure 3.1 illustre un exemple de réducteur mécanique qui reçoit l'arbre mécanique du moteur auquel il est associé. Il comprend un ensemble d'engrenages et un arbre réducteur doté d'un palier.
Les engrenages notés ![]() comportent un nombre de dents noté
comportent un nombre de dents noté ![]() , un couple
, un couple ![]() et sont fixés sur des arbres qui possédent une inertie
et sont fixés sur des arbres qui possédent une inertie ![]() , un frottement visqueux
, un frottement visqueux ![]() et une position angulaire
et une position angulaire ![]() .
D'aprčs le schéma de la figure 3.1 et selon [1], il est possible d' écrire que,
.
D'aprčs le schéma de la figure 3.1 et selon [1], il est possible d' écrire que,
Si l'on considére que l'on n'a pas de pertes sur les engrenages alors la puissance se transmet intégralement d'un arbre ŕ l'autre d'oů:
| (3.3) |
| (3.4) |
Les équations mécaniques, associées ŕ chaque arbre, s'écrivent:
| (3.7) |
| (3.8) |
| (3.9) |
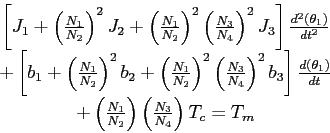
On obtient, aprčs substitution des relations 3.1, 3.2, 3.5 et 3.6, la relation suivante:
| (3.11) |
| (3.12) |
![\includegraphics[width=9cm]{reduct.eps}](img566.png)